I am a Postdoctoral Scholar in the Burdick Group at Caltech doing research with Prof. Joel Burdick. I earned my Ph.D. in Aerospace Engineering at Texas A&M University under the supervision of Prof. Manoranjan Majji, where I focused on developing provably safe control algorithms for autonomous systems. I first became interested in control theory during my undergrad at Cornell with Prof. Silvia Ferrari.
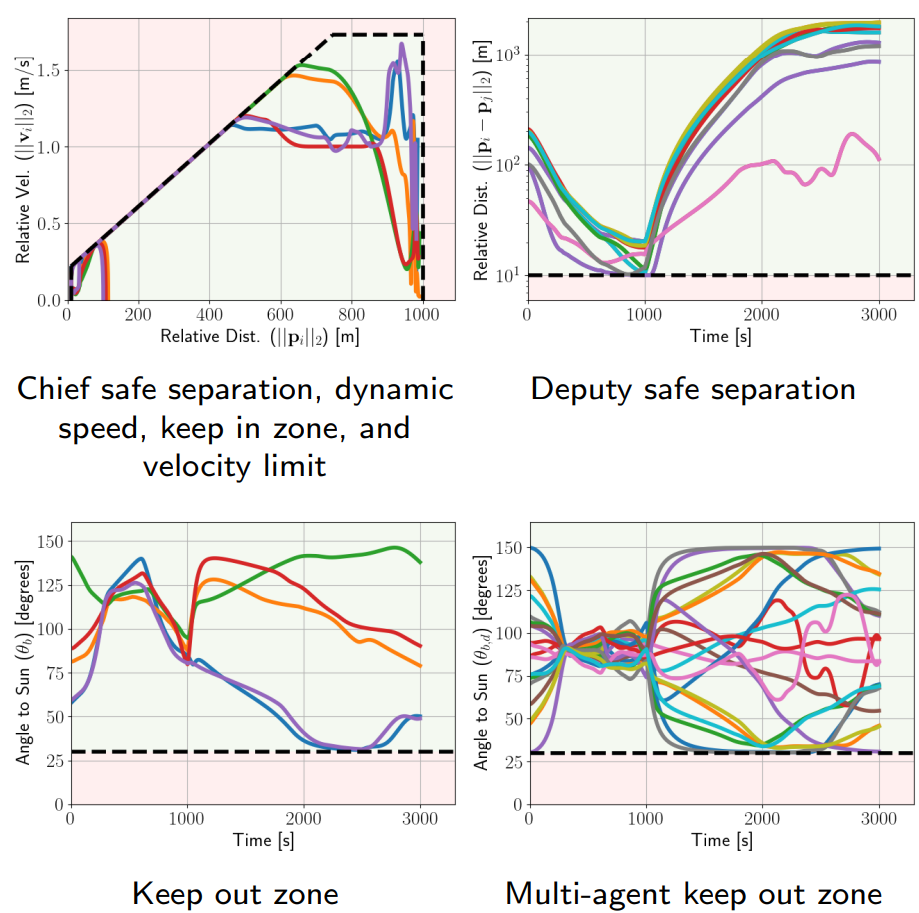
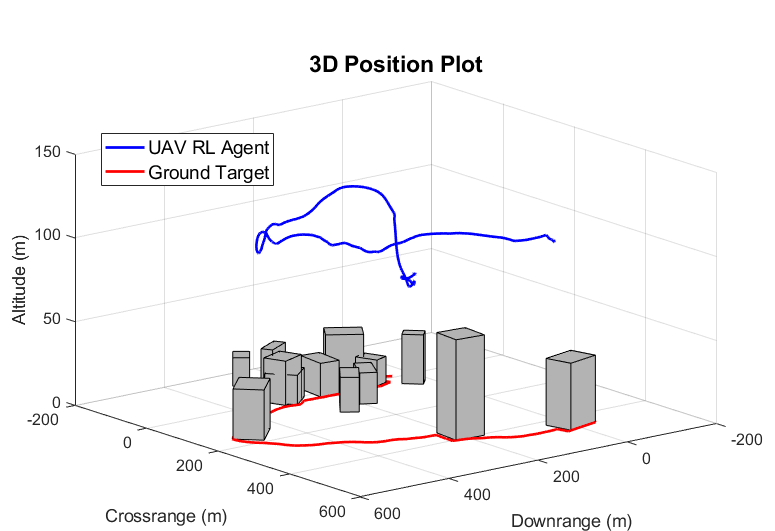
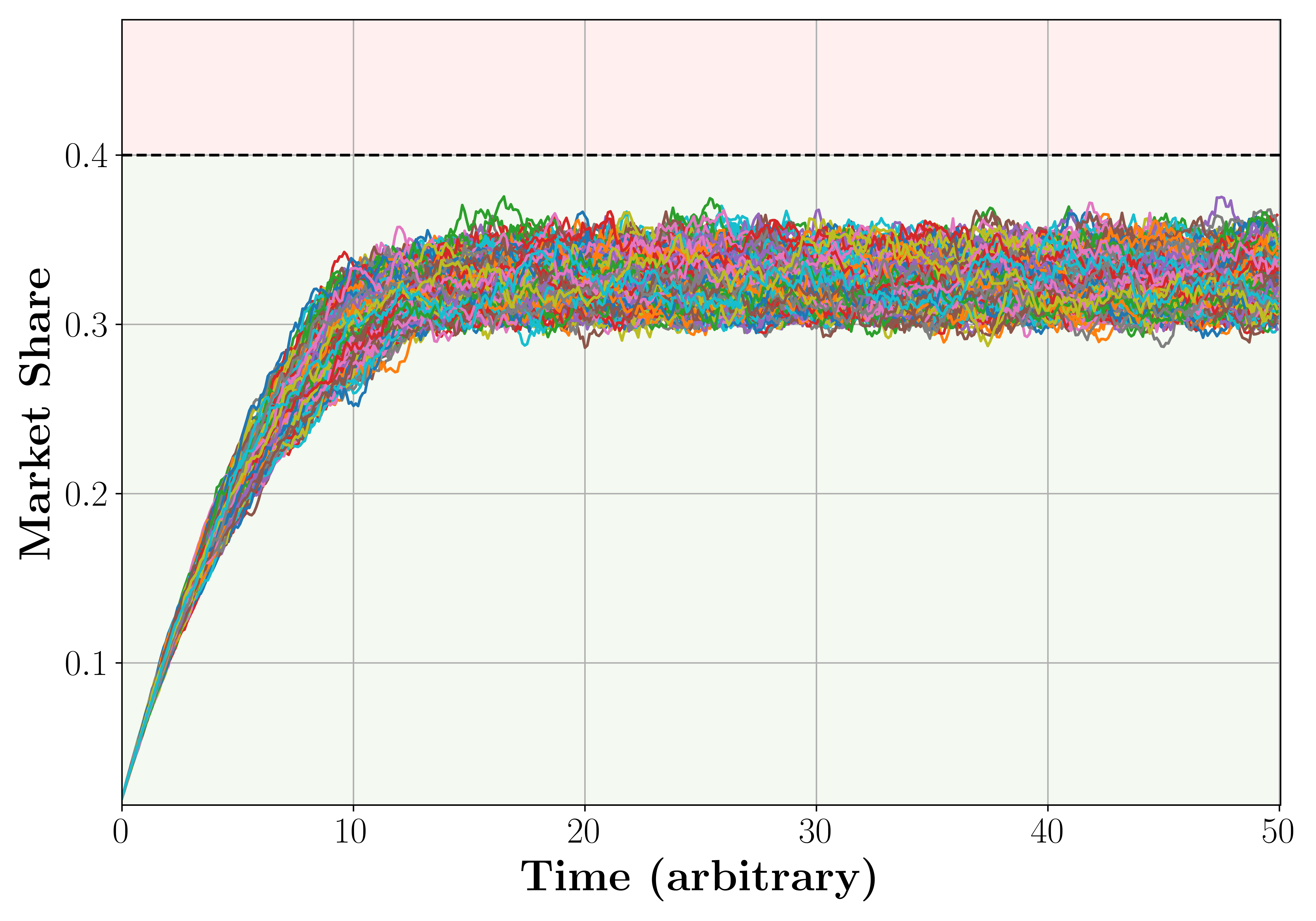
During my graduate studies I worked closely with Dr. Kerianne Hobbs in the safe autonomy team at AFRL. At AFRL, I worked on developing novel safety-critical control methods to allow safe, learning-enabled control on USAF and USSF aerospace systems.
I am interested in problems which merge control theory, optimization, and estimation to enhance the reliability of autonomous systems in complex environments.
California Institute of Technology
Postdoctoral Scholar, Mechanical & Civil Engineering, (August 2025 – )
Texas A&M University
Ph.D., Aerospace Engineering, (2021 – 2025)
Dissertation: Safety-Critical Control of Input-Constrained Systems
Cornell University
B.S., Mechanical & Aerospace Engineering, (2017 – 2021)
Magna Cum Laude